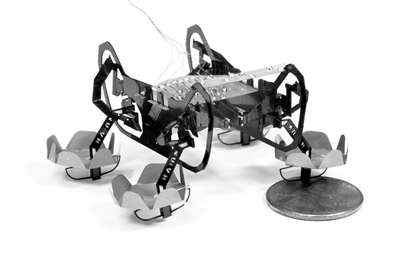
Release date: 2018-07-06 "Machine 蟑螂" Image source: Harvard University official website According to recent news from Harvard University's official website, the school's researchers have developed an "amphibious" amphibious "Ambulatory Microrobot" (HAMR) that looks like a "machine squat" that can walk on land and swim on the surface. If necessary, you can walk underwater. This design has found new uses for small robots. The researchers explained that HAMR uses "multi-functional mats" that can swim on the surface of the water by buoyancy generated by the surface tension of the liquid and, more importantly, by submerging the water surface by applying a voltage when necessary. Its entire body is covered with a special waterproof coating to avoid short circuits in the water. The HAMR also has four pairs of asymmetric flaps that, using the unstable interaction between the flaps and the surrounding water, produce a swimming gait similar to a diving beetle, which allows it to swim and turn forward effectively. In addition, moving on the surface of the water also makes it possible to avoid underwater obstacles and reduce drag. The study was published in the journal Nature Communication. Kevin Chen, the first author of the paper and a postdoctoral fellow at the John Paulson School of Engineering and Applied Sciences (SEAS) at Harvard University, said: "This research shows that micro-robots can take advantage of small-scale physics - in this case Surface tension – to perform challenging tasks for large robots.†The weight of the robot is equivalent to a paper clip, only about 1.65 grams, can carry an extra load of 1.44 grams, and can slide its legs at a frequency of up to 10 Hz. The researchers point out that the size of the robot is critical to performance. If it is too large, it may be difficult to float on the surface of the water; if it is too small, it will not be able to generate enough force to break the surface tension (dive into the water). In an underwater environment, the HAMR exhibits the same superior mobility as on land. However, it still has shortcomings. For example, after diving into the water, it can only rely on the slope of the bottom of the water to slowly climb back to the ground. The researchers will focus on solving the water outflow problem of HAMR in the next step, hoping to find a way to return to land without ramps, possibly using impulse jumping mechanism. (Reporter Liu Xia) Source: Technology Daily Zhejiang Haisheng Medical Device Co., Ltd , https://www.hisernmedical.com